因果学习篇(1)-后门准则
分类: 人工智能、学习笔记 2902 2
后门准则
本次分享的知识来源于《Causal Inference in Statistics:A Primer》的翻译版本《统计因果推理入门》,该书由杨娇云等人翻译,主要包括因果学习的基础知识。
电子图书获取方法:
关注公众号“AI八倍镜”并回复“因果学习”。
知识回顾
在上一小节“校正公式”当中,学习到:
- 在固定X取值x的情况:用do(x)表示。
- P( Y=y | do( X=x ) ) 表示通过干预使得X=x时 Y=y的概率,反映了如果群体中的每个个体均将X值固定为x时,Y的总体分布。
- P(Y=y | do(X=x), Z=z) 表示对于给定的Z=z,干预do(X=x)得到的分布中Y=y的条件概率。
最后的结论是:确定一个变量对另一个变量的因果效应时,需要讲该变量的父节点变量进行校正。
问题
在现实生活中的问题中,变量通常有不可观察的父节点,那么如何从观察到的非干预数据集中计算变量间的因果效应?对于因果图结构而言,如何利用因果图结构计算数据的因果效应?
解决
基于上述问题,引入了后门准则。首先,介绍一种新的名词叫后门路径:
如果一条连接X和Y的路径中,有指向X的箭头,则这条路径被称为从X到Y的后门路径。
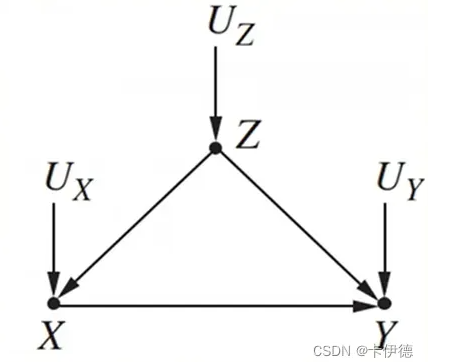
例如,对上图来说,X←Z→Y就是一条后门路径。
那么,后门准则的定义为:给定有向无环图中的一对有序变量(X,Y),如果变量集合Z满足:
(1)Z中没有X的后代节点;
(2)Z阻断了X与Y之间的每条含有指向X的路径;
则称Z满足关于(X,Y)的后门准则。
若变量集合Z满足(X,Y)的后门准则,则X对Y的因果效应公式:

一般来说,后门准则中的节点集合Z满足下列条件:
1)阻断X和Y之间每条含有指向X的路径; (Z在后门路径中)
2)保持所有从X到Y的有向路径不变; (Z不为X的任何后代节点)
3)不会产生新的含有指向X的路径。(Z不为任何对撞节点)
后门准则的应用场合是:
变量通常有不可观察的父节点,节点值无法得到,需要一个替代的变量集合用于校正。后门准则可以确定,对于由有向无环图表示的因果模型中的任何两个变量X和Y,应该以模型中的哪些变量Z为条件来寻找X和Y之间的因果关系。
例子

例如,对上图所示的因果图来说,试图获取 药物X 对痊愈率Y 的因果效应,测量了体重W(影响痊愈率),加入了经济社会地位Z(影响患者体重和对接受质量的选择,缺失统计数据)。
那么就可以以节点W作为条件:
(1)阻断了X←Z→W→Y路径;
(2)非X的后代;
则,X对Y的因果效应公式可表示为:

拓展
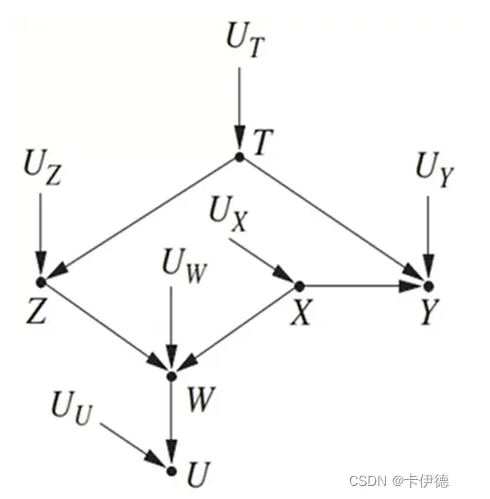
对于上图来说,不存在X到Y的后门路径,即空集满足后门准则,则不需要校正,校正公式:
 此外,如果固定W为w,则产生新的伪路径:X→Z←T→Y,选择以T为条件阻断X→Z←T→Y ,校正公式:
此外,如果固定W为w,则产生新的伪路径:X→Z←T→Y,选择以T为条件阻断X→Z←T→Y ,校正公式:
 上式称为W-特定因果效应,后续章节还会用到该效应。
上式称为W-特定因果效应,后续章节还会用到该效应。
电子图书获取方法:
关注公众号“AI八倍镜”并回复“因果学习”。
前面的知识后后面的知识还会继续更新和补充,请持续关注~
共 2 条评论关于 “因果学习篇(1)-后门准则”